Hello everyone. I’ve been working on adding Bay Trail support to libgfxinit as a GSoC project. Yes, as I don’t usually talk much outside of IRC and Gerrit, I would imagine this post would come up as a surprise to most people. Despite the journey being way more difficult than initially foreseen, I eventually managed to get most of what I could test on Bay Trail working, with next to no spaghetti-looking code.
The commits adding Bay Trail support to libgfxinit and integration with coreboot can be retrieved with this Gerrit query. Additionally, the coreboot port for the Asrock Q1900M mainboard used for testing can be found on this Gerrit change.
I ran into several problems while working on this GSoC project, and submitted various fixes and improvements. Links to these commits can be found in later sections. Strictly speaking, these commits are not directly related to this GSoC project, but they spurred when working on GSoC.
Unfortunately, I ran into multiple setbacks, which precluded me from completing everything I had originally planned within the GSoC timeframe:
- Since I only managed to fix some bugs last-minute, the code has not been formally verified yet. Nevertheless, formally verifying the code before it works and has been reviewed is rather pointless, since it needs to be verified again after amending it.
- DisplayPort and integrated panel support could not be tested due to inaccessible hardware. I had to take a plane from the university campus to home on June and it was impossible to squeeze both the Asrock Q1900M and the Asus X551MA in my luggage. I decided to bring the Asrock Q1900M, as it is more compact and easier to work with.
- There was no time left to work on Braswell support. While Bay Trail and Braswell are somewhat related, there are many differences regarding the undocumented parts of the hardware, and there’s even less documentation.
Undeterred by any misfortunes, I am going to finish what I started, come hell or high water.
Project details
libgfxinit is a graphics initialization (aka modesetting) library for embedded environments. It currently supports only Intel hardware, more specifically the Intel Core processor line. It can query and set up most kinds of displays based on their EDID information. You can, however, also specify particular mode lines.
Support for the Intel Bay Trail platform is was missing in libgfxinit. The code hasn’t landed upstream yet, so one would need to fetch it from Gerrit in order to use it. This involves fetching the libgfxinit patches first, using the checkout download option on CB:42359 (the topmost change), and then cherry-picking CB:44071 and CB:44072 into coreboot. CB:44938 and CB:39658 show how to enable libgfxinit for Bay Trail mainboards. Since the available video ports is mainboard-specific, gma-mainboard.ads needs to be adjusted accordingly.
Trials and Tribulations
The hardware is cursed
Getting software to work usually takes some testing, but when said software interacts with hardware, testing becomes essential. And when said hardware is largely undocumented, testing is pretty much the only option. The Display chapters of the graphics programming manuals for these platforms lack the information that matters for libgfxinit. Even the Bay Trail documentation turned out to be incomplete, especially regarding the display PHY and PLL registers. When working on libgfxinit, I soon got Bay Trail to show something on a monitor. However, making that work reliably took much longer than I expected. This was mainly because I needed to spend at least a day or two without looking at the code to see what was wrong with it.
Said PHY and PLL registers are hidden within IOSF-SB, a sideband interconnect network accessed through a mailbox-style interface. To access a register, not only does one need to read or write the register contents, but also needs to program the destination port (address of the hardware block), opcode (which type of read or write) and register offset, and then poll a busy bit until the operation is complete. Of course, this register access mechanism is not described in the graphics documentation, so the only references are existing graphics drivers. Reading someone else’s code in order to understand what documentation should say is, at best, downright painful.
After I managed to get something to show on the screen, I noticed that this would only work on very specific system states. In addition, manually (using the intel_reg utility) writing several undocumented registers before running gfx_test would sometimes help. I eventually figured out that most of the accesses to undocumented registers did not have any effect, because of a blunder in the IOSF accessor library I wrote: I messed up the bitfields when assembling the request register (contains the target port, opcode and some always-one bits), so the accesses would often end up going to the wrong port.
There’s always more bugs
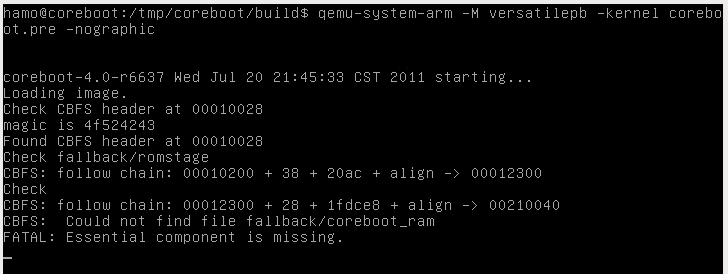
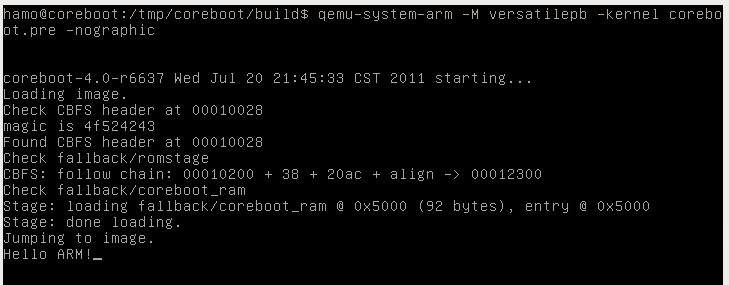
The Bay Trail code in coreboot was only used by a single mainboard: the Google Rambi chromebook/chromebox/chromebase family. Memory initialization is done by a binary-only executable, which contains Intel’s MRC (Memory Reference Code). This binary is simply called “MRC binary” or mrc.bin (the file’s name). However, it is actually an ELF binary, and the Makefile in coreboot will place it at a different offset depending on the file extension. So, Bay Trail has a mrc.elf instead: using the mrc.bin name will place the binary at the wrong offset, and won’t work.
Once this mystery was solved, the MRC on the Asrock Q1900M would not detect any DIMMs. Turns out SMBus support in MRC is broken, so one needs to read the SPD contents into a buffer, and then pass that buffer to the MRC. CB:44092 takes care of that.
Even then, MRC would still refuse to work on the Asrock Q1900M. After some digging, it is because it checks the memory type in the SPD, and bails out if they are not SO-DIMMs or do not support 1.35V operation. The Asrock Q1900M uses full-size desktop UDIMMs, which may not always support 1.35V operation. CB:39568 patches the necessary values in the SPD buffer so that MRC will function as intended.
Externally-induced translocation
I don’t mind running errands or going out in general. However, I do utterly despise having to move and live elsewhere: I have to pack my computers and parts, and I have lots of them. I live in an archipelago, I don’t have my own house nor car yet, and my parents’ home and the university campus aren’t on the same island. Dad usually comes with his car at the start/end of the school year, as I need to move lots of stuff. Oh, and my parents are divorced, so my sister and I go back and forth when not abroad.
Because of the coronavirus outbreak, in-person lessons were suspended for the rest of the academic year. Most people living in the university campus (there’s a students’ residence in there) went back home almost immediately. I didn’t, because I didn’t feel like taking a plane amidst the outbreak and preferred to stay in my cozy server dorm room. However, as there were no more in-person lessons, the residence had to close, and I eventually had to leave. Moreover, Dad couldn’t come this time because he was overwhelmed by work (he was unable to work during lockdown, so everything piled up until the lockdown ended). So, I had to take a plane and leave most of my stuff in the residence, including all of my monitors with digital inputs and one of my two Bay Trail machines, which I had planned on using for GSoC.
And if that wasn’t enough, I’ve had to pack my things again, every week. This means each week only had six useful days, at best. This, plus everything else going on at home, quickly burned me up. It reached a point where I couldn’t bear any longer and had to take a two-week break from coreboot development.
Conclusion
Although there were many unforeseen hurdles and problems around every corner, I would still call this a huge success. Just like university assignments, it has been rushed down to the last minute.