This post covers the complete set-up and building coreboot for cubieboard. Due to lack of documentation for this, I had to spend sometime figuring out the details; hence decided to write it myself to help others in the future.
- Step 1: Build Payload
As mentioned here, what we have to do first is to build a payload to use later for coreboot.rom. A suitable ARM payload is the sunxi/uboot. Now, there are two ways to build uboot: natively or from another system. To build from another system, we need to get a suitable toolchain. For that you need to do:
apt-get install gcc-arm-linux-gnueabihf
Too many issues are faced to get this toolchain set up right 😐 A more suitable and convenient method is to build uboot natively from the cubieboard itself (thanks #cubieboard for the tip :P). For this follow the instructions here. tl;dr Clone repository, choose you target board, make (without CROSS_COMPILE). This completes building the payload. NOTE: The correct file to use as the payload is “u-boot”, not u-boot.bin. The “u-boot” file is the non-SPL part of uboot in elf format. The log for successful build can be seen here.
file u-boot u-boot: ELF 32-bit LSB shared object, ARM, version 1 (SYSV), dynamically linked (uses shared libs), not stripped
2. Step 2: Build coreboot
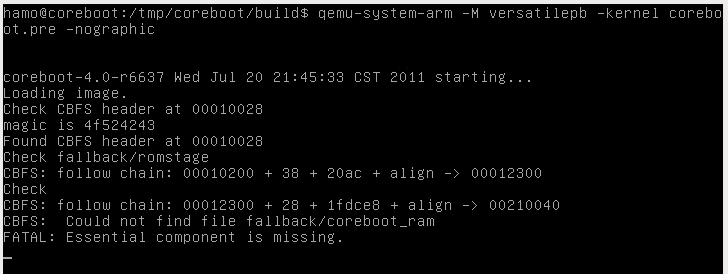
Before following the instructions on the coreboot/Build_HOWTO, you first need the latest development code; which contains the mmc driver needed to load romstage, etc.
You need to make crossgcc first. This might take a lot of time: be patient 😛 Some missing toolchain errors can arise. Get past them by:
apt-get install bison flex patch add-apt-repository ppa:linaro-maintainers/toolchain
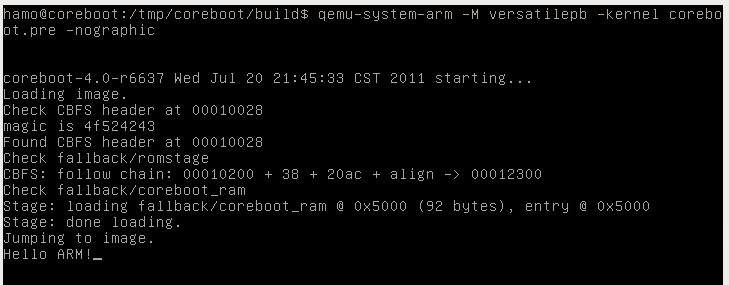
Once this is done, set your suitable configuration in make menuconfig. Make sure to disable CONFIG_VGA_ROM_RUN (set by default), since it doesnt work for ARM boards. Just make and wait. Your coreboot.rom is ready. 🙂
This image needs to be placed on the SD card:
dd if=build/BOOT0 of=/path/to/sdcard/blockdev bs=1024 seek=8
Now pfff! this is enough to get coreboot up and running! 😀
For the next week; our plan is to Identify locations of the map() and read() calls; and to determine size of each map(). The driver is currently configured to pull the entire cbfs into ram; so we work to reduce size of these mappings.