The best plan is no plan at all, then everything goes according to the plan. (Jacek Bukowski)
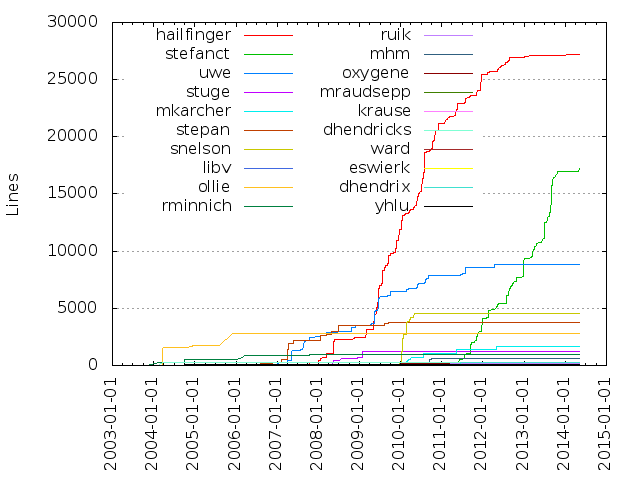
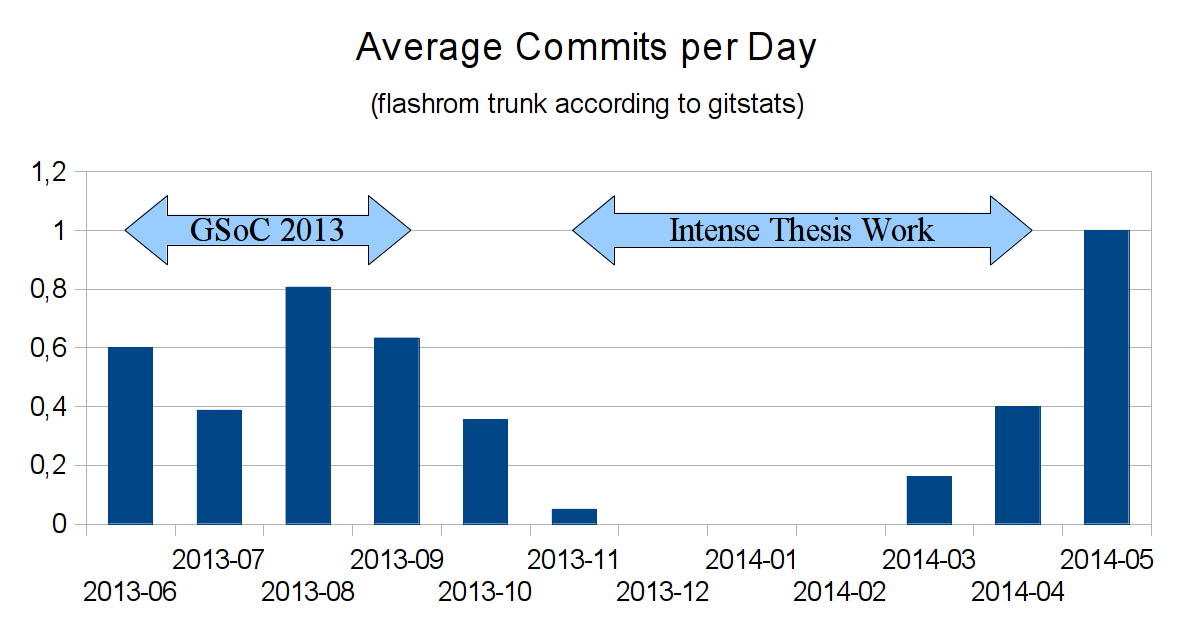
I am 142% on track according to my proposal so far if you take the quote above seriously. But even if you don’t the progress so far is way better than I would have hoped for when I applied. I made 22 commits so far during the official coding period (starting with 2014-05-19 or within ~16 days), and 49 if you count from the date of project acceptance (2014-04-21, i.e. ~37 days). That’s pretty significant for a project that normally does 100-150 commits per year. Not all of the patches were authored by myself, and some of them were bitrotting for an extended period of time before I revived them. I have also reviewed, rebased and merged patches sent in by foreigners as well as long-term contributors. Even Carl-Daniel awakes periodically from hiatus and helps where he can. So flashrom seems to be pretty vivid again, yay.
Two of the most interesting sets of changes are the eventually committed support for AMD’s Yangtze-based SPI controller (found in Kabini and Tamesh), and finer-grained display of support/test status of hardware. For example we can now clearly indicate if a flash chip is actually a ROM that can only be probed and read. This has become necessary when we added our first ROM chip, Macronix MX23L3254. The results can be seen in the wiki as well as flashrom’s -L output. Besides that there were also various new chips and even two programmers committed with another 1-3 waiting.
It is still a bit early to nail down any fundamental changes I want to tackle, but I think I’ll manage to rewrite the probing algorithm completely this year. I have made one huge step towards that by getting rid of the .probe_timing field of struct flashchip. It was used by some probing functions of parallel chips but there were only about 5 concrete values so they could easily be wrapped into stub functions. This is – as Carl-Daniel correctly stated – not what we normally do… replacing data in tables with code, but in this case I think it is completely justified. The next big step will be to turn the probing loop inside-out. Currently we iterate over all flash chips, filter the ones compatible with the selected programmer, and execute the respective probing function stored. Naturally this creates the same results over and over again because there is only about a dozen different probing functions. That does not only take a lot of unnecessary time but also makes it hard to support more than one probing function. It should be the other way round: we should iterate over all possible probing functions and match the results with the stored flash chips. I will report back how far I got with that in my next post.